
|
BUMBLE: Unifying Reasoning and Acting with VLMs for Building-Wide Mobile Manipulation
Rutav Shah, Albert Yu, Yifeng Zhu, Yuke Zhu, Roberto Martín-Martín
Technical Reports, 2024
project
paper
code
|

|
Okami: Teaching humanoid robots manipulation skills through single video imitation
Jinhan Li, Yifeng Zhu*, Yuqi Xie*, Zhenyu Jiang*, Mingyo Seo, Georgios Pavlakos, Yuke Zhu
Conference on Robot Learning (CoRL) (oral presentation), 2024
project
paper
video
|
|
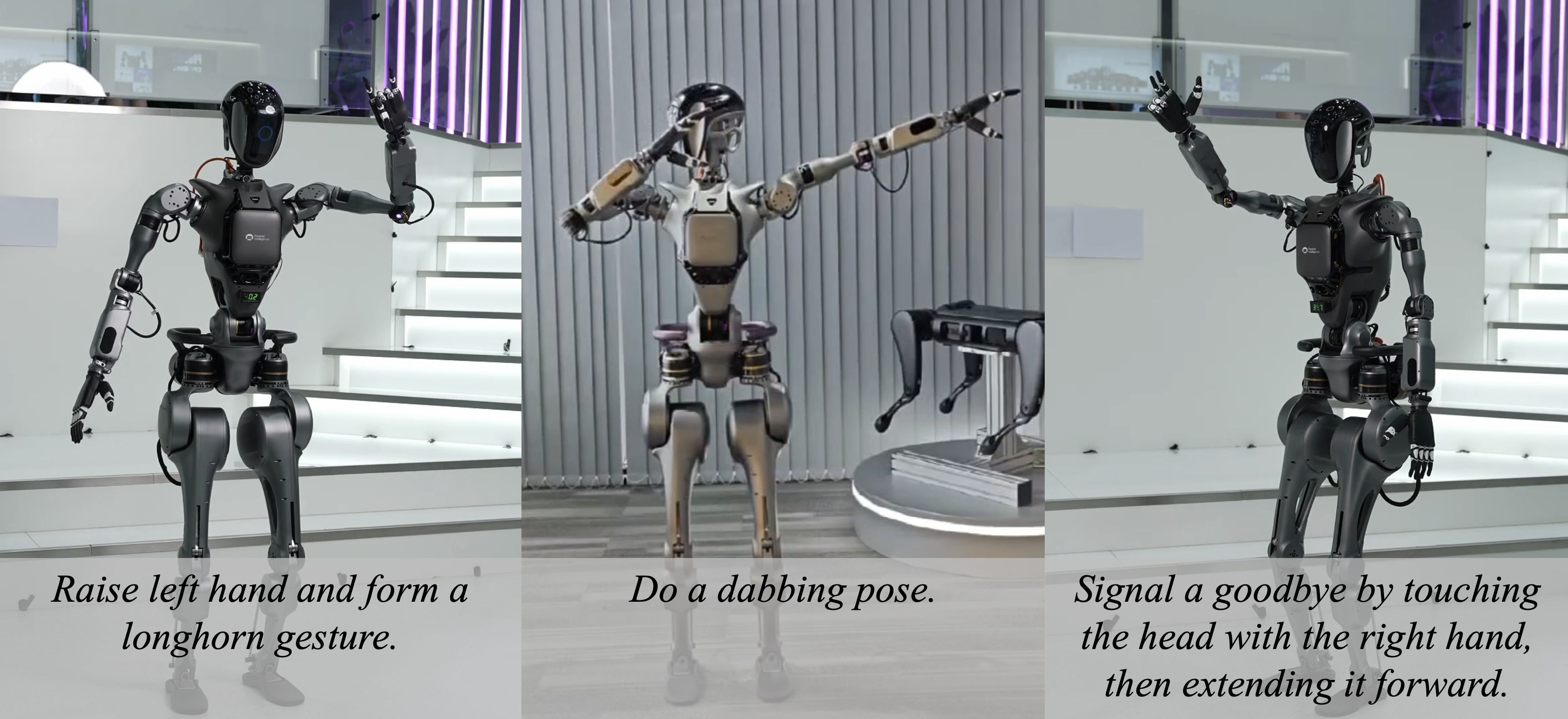
Harmon: Whole-Body Motion Generation of Humanoid Robots from Language Descriptions
Zhenyu Jiang*, Yuqi Xie*, Jinhan Li, Ye Yuan, Mingyo Seo, Jinhan Li, Yifeng Zhu, Yuke Zhu
Conference on Robot Learning (CoRL), 2024
project
paper
|

|
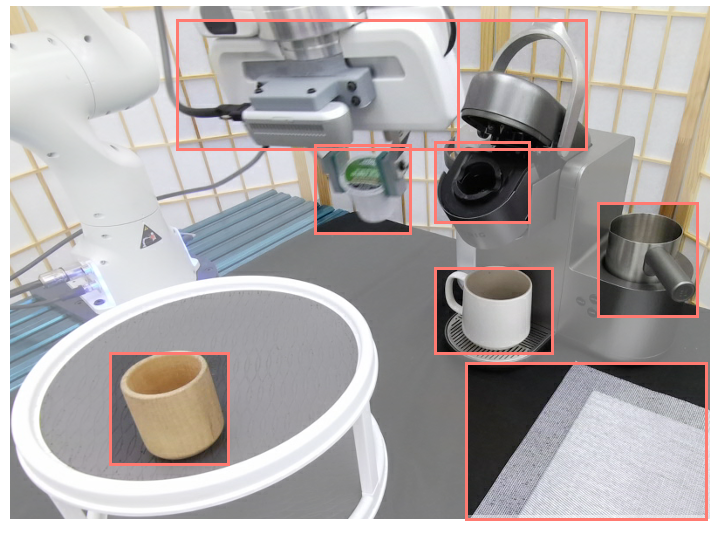
ORION: Vision-based Manipulation from Single Human Video with Open-World Object Graphs
Yifeng Zhu, Arisrei Lim, Peter Stone, Yuke Zhu
ArXiv Preprint, 2024
project
paper
video
|
|
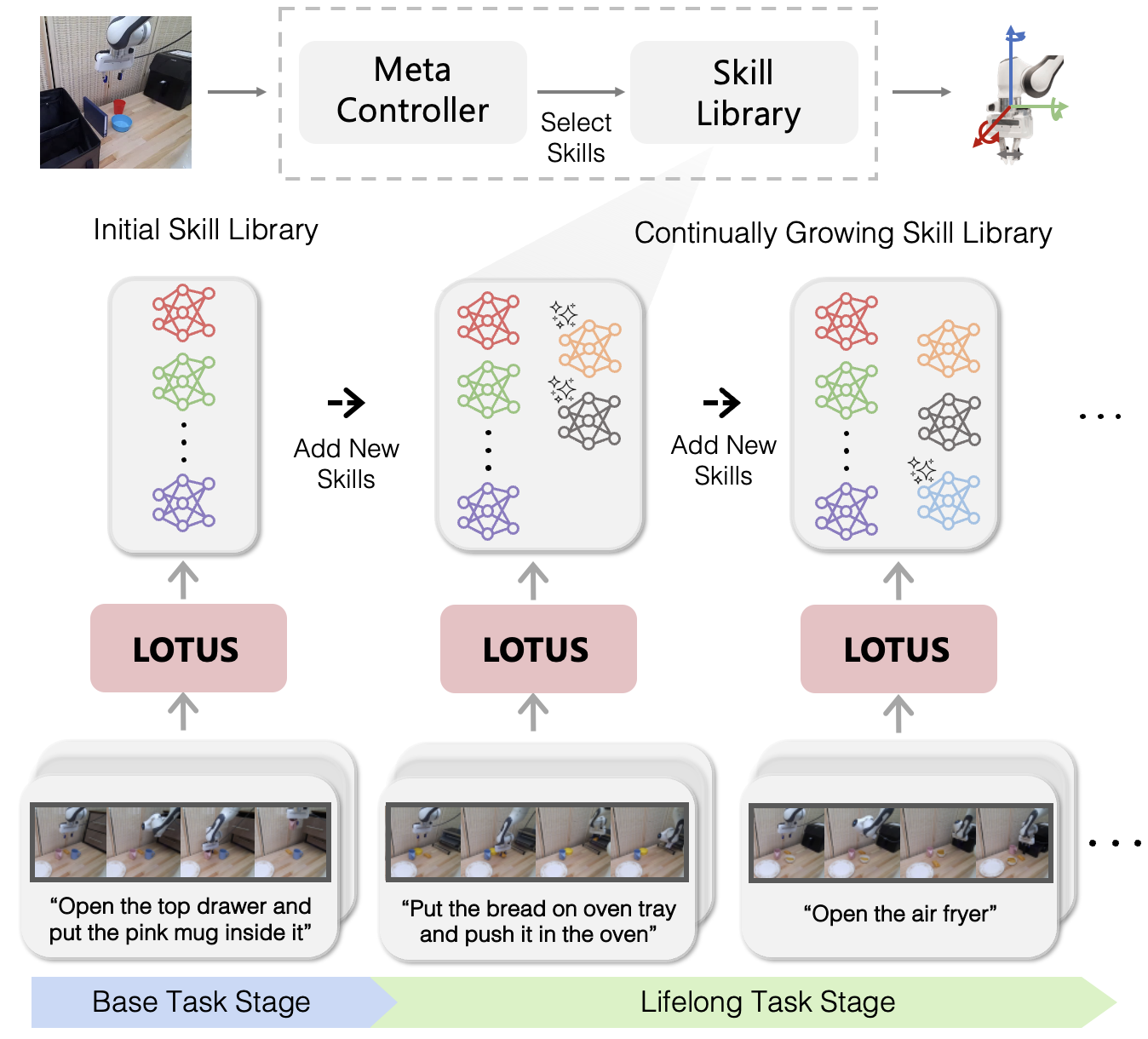
LOTUS: Continual Imitation Learning for Robot Manipulation Through Unsupervised Skill Discovery
Weikang Wan, Yifeng Zhu*, Rutav Shah*, Yuke Zhu
International Conference on Robotics and Automation (ICRA), 2024
project
paper
video
|
|
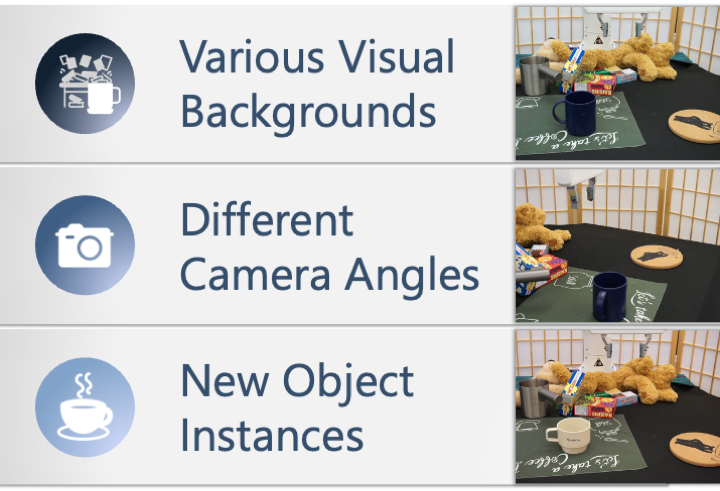
GROOT: Learning Generalizable Manipulation Policies with Object-Centric 3D Representations
Yifeng Zhu, Zhenyu Jiang, Peter Stone, Yuke Zhu
Conference on Robot Learning (CoRL), 2023
project
paper
video
code
poster /
|

|
LIBERO: Benchmarking Knowledge Transfer in Lifelong Robot Learning
Bo Liu*, Yifeng Zhu*, Chongkai Gao*, Yihao Feng, Qiang Liu, Yuke Zhu, Peter Stone
NeurIPS 2023 Datasets and Benchmarks Track, 2023
project
paper
code
|
|
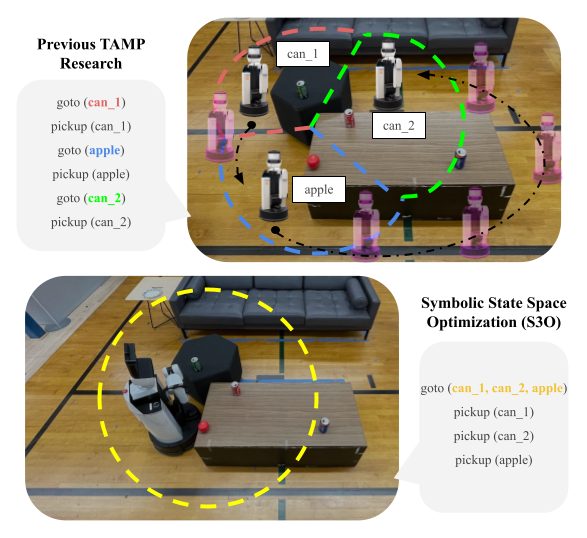
Symbolic State Space Optimization for Long Horizon Mobile Manipulation Planning
Xiaohan Zhang, Yifeng Zhu, Yan Ding, Yuqian Jiang, Yuke Zhu, Peter Stone, Shiqi Zhang
International Conference on Intelligent Robots and Systems (IROS), 2023
project
paper
poster /
|

|
Deoxys: A Modular, Real-Time Controller Library for Robot Learning
Yifeng Zhu
, 2023
project
video
code
|
|
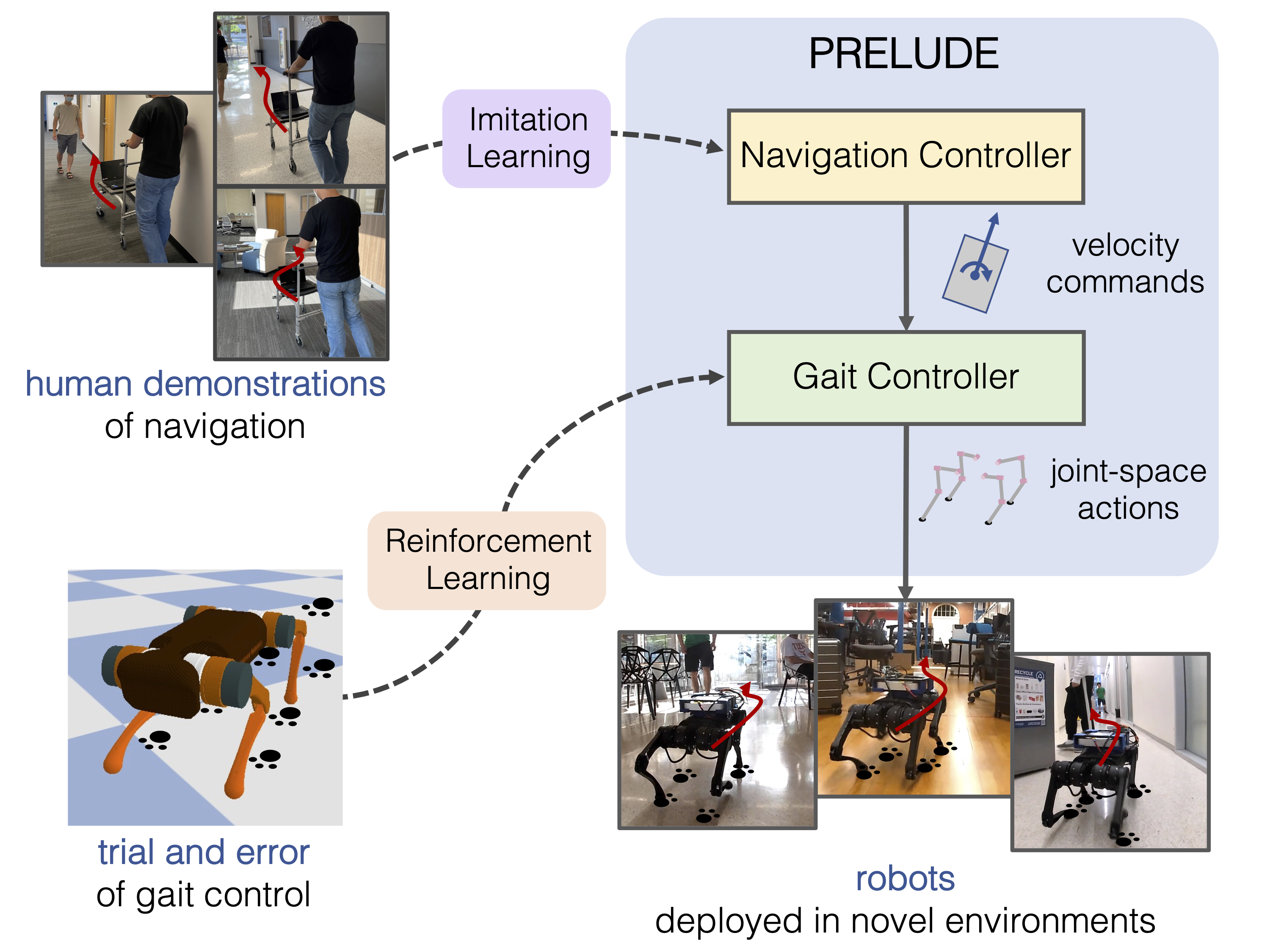
Learning to Walk by Steering: Perceptive Quadrupedal Locomotion in Dynamic Environments
Mingyo Seo, Ryan Gupta, Yifeng Zhu, LuisSentis, Yuke Zhu
ICRA, 2023
project
paper
code
|
|
VIOLA: Imitation Learning for Vision-Based Manipulation with Object Proposal Priors
Yifeng Zhu, Abhishek Joshi, Peter Stone, Yuke Zhu
Conference on Robot Learning (CoRL), 2022
project
paper
code
poster /
|
|
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Martín-Martín, Abhishek Joshi, Soroush Nasiriany, Yifeng Zhu
Technical Report, 2022
project
paper
code
|

|
Visually Grounded Task and Motion Planning for Mobile Manipulation
Xiaohan Zhang, Yifeng Zhu, Yan Ding, Yuke Zhu, Peter Stone, Shiqi Zhang
International Conference on Robotics and Automation (ICRA), 2022
project
paper
code
|
|
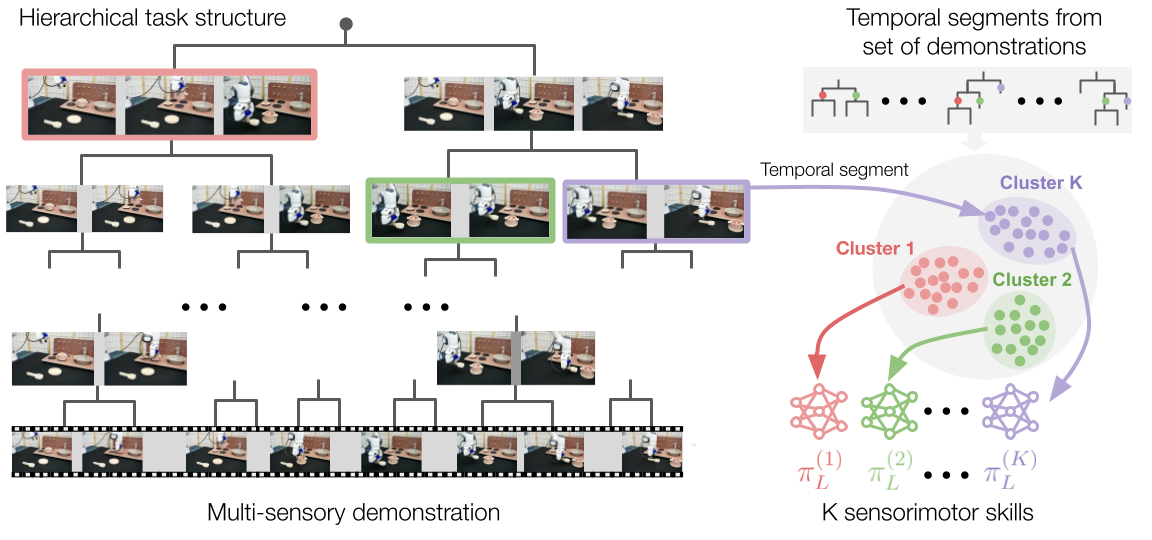
Bottom-Up Skill Discovery from Unsegmented Demonstrations for Long-Horizon Robot Manipulation
Yifeng Zhu, Peter Stone, Yuke Zhu
IEEE Robotics and Automation Letters (RA-L), 2022
project
paper
video
code
|
|
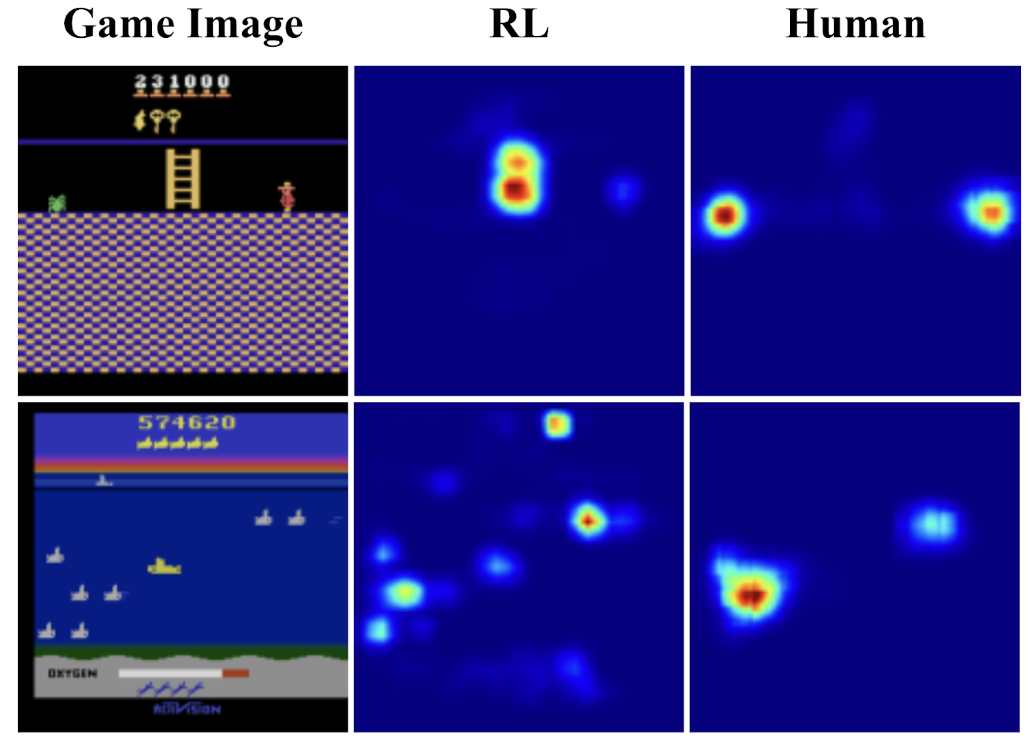
Machine versus Human Attention in Deep Reinforcement Learning Tasks
Sihang Guo, Ruohan Zhang, Bo Liu, Yifeng Zhu, Mary Hayhoe, Dana Ballard, Peter Stone
Advances in Neural Information Processing Systems (NeurIPS), 2021, 2021
paper
|
|
UT Austin Villa: An Open-source Gym Environment forDeep Reinforcement Learning on 3DSim
Bo Liu, William Macke, Caroline Wang, Yifeng Zhu, Patrick MacAlpine, Peter Stone
Technical Report, 2021
paper
|
|
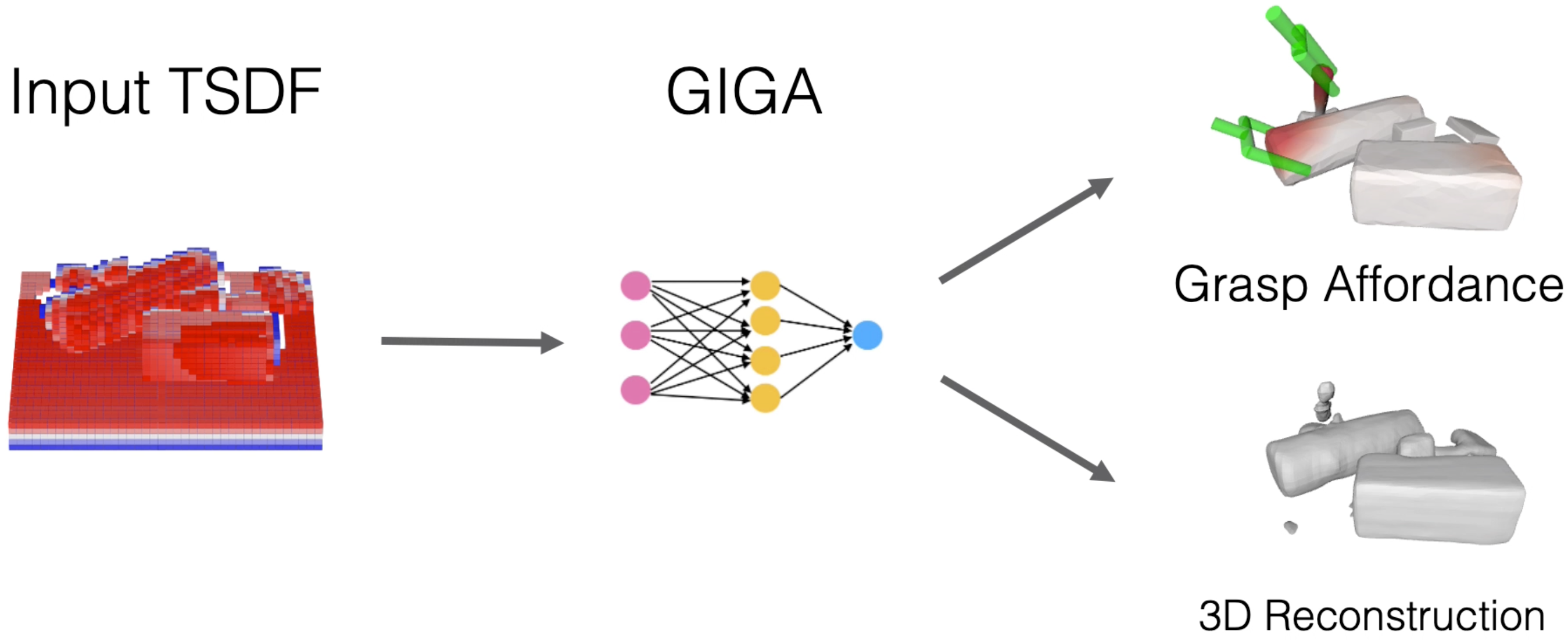
Synergies Between Affordance and Geometry: 6-DoF Grasp Detection via Implicit Representations
Zhenyu Jiang, Yifeng Zhu, Maxwell Svetlik, Kuan Fang, Yuke Zhu
Robotics: Science and Systems (RSS), 2021
project
paper
video
code
|
|
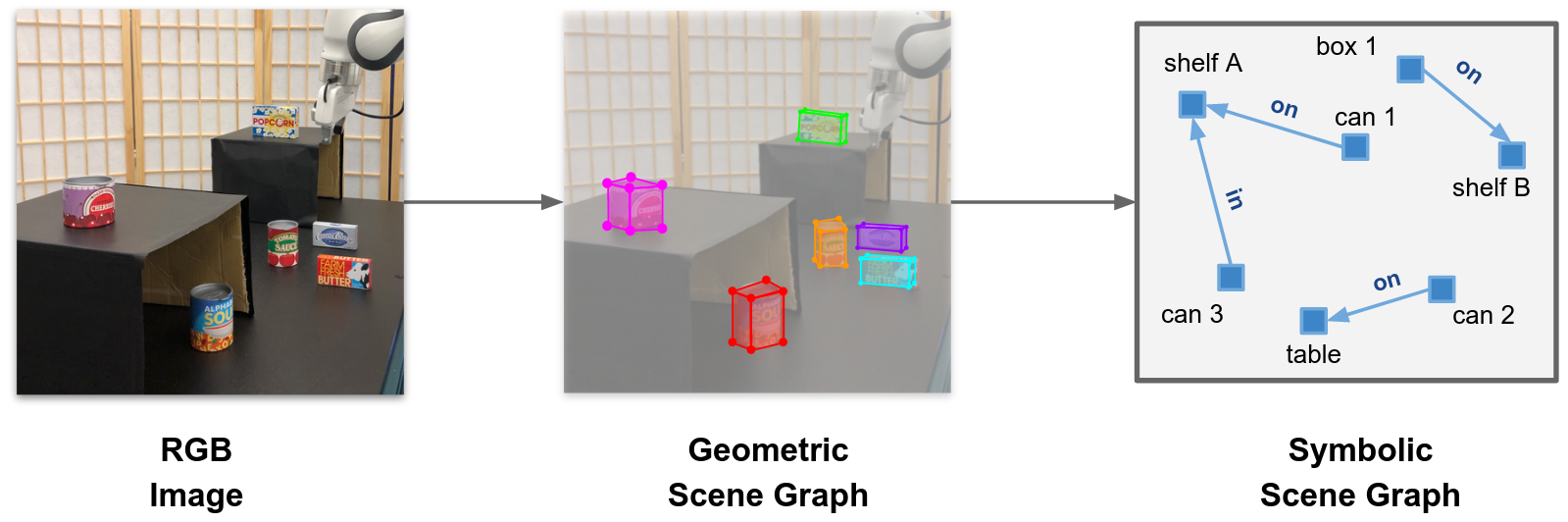
Hierarchical Planning for Long-Horizon Manipulation with Geometric and Symbolic Scene Graphs
Yifeng Zhu, Jonathan Tremblay, Stan Birchfield, Yuke Zhu
International Conference on Robotics and Automation (ICRA), 2021
project
paper
video
|
|
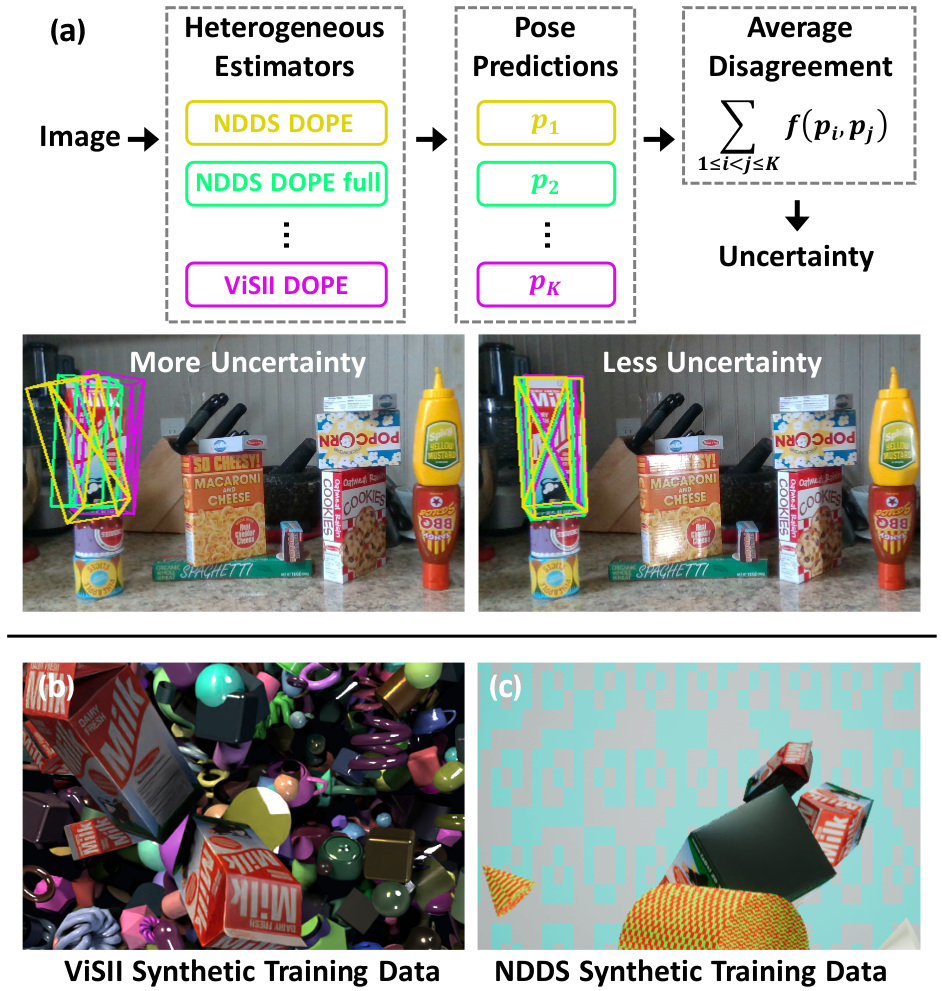
Fast Uncertainty Quantification for Deep Object Pose Estimation
Guanya Shi, Yifeng Zhu, Jonathan Tremblay, Stan Birchfield, Fabio Ramos, Animashree Anandkumar, Yuke Zhu
International Conference on Robotics and Automation (ICRA), 2021
project
paper
video
|
|
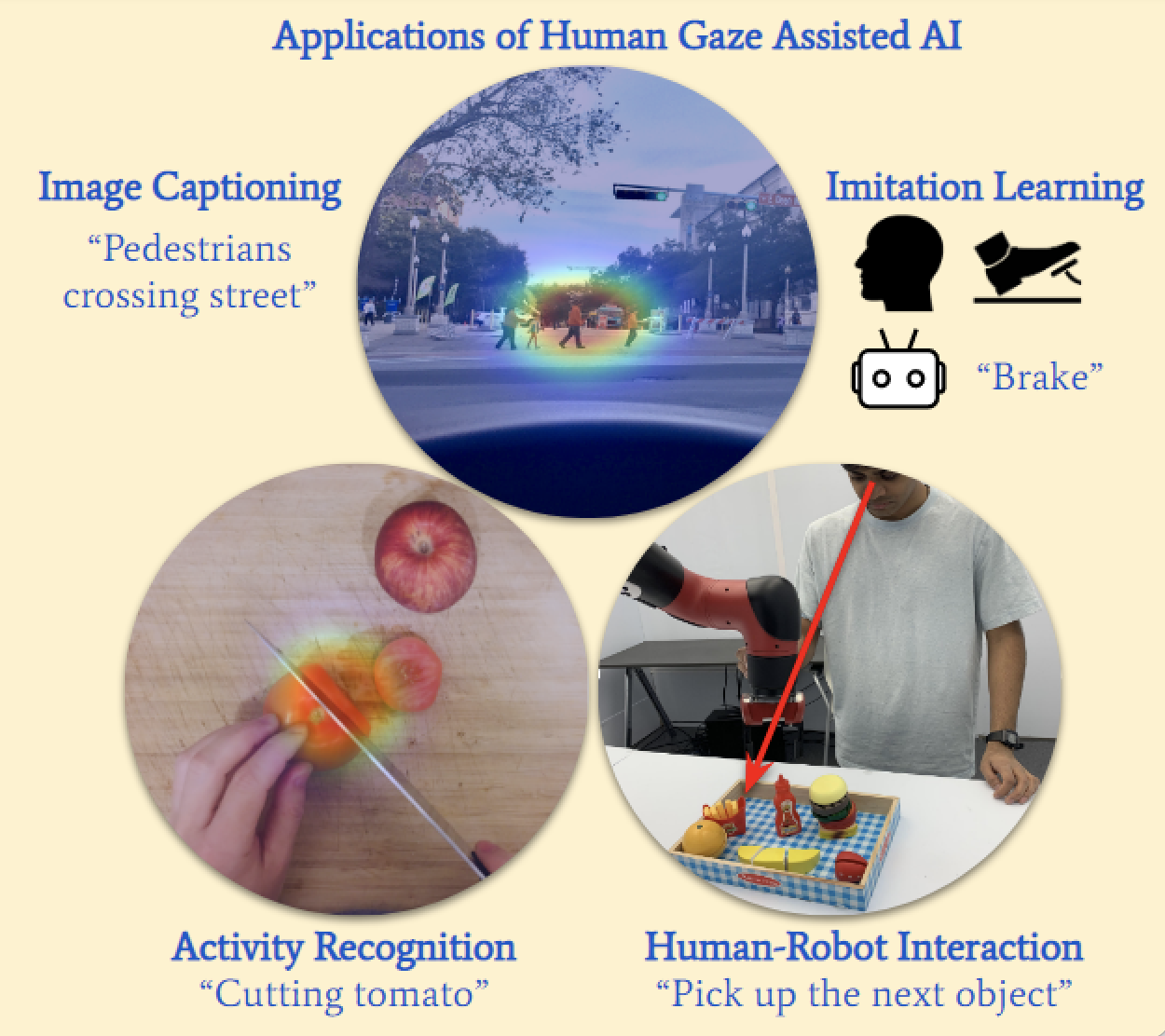
Human Gaze Assisted Artificial Intelligence: A Review
Ruohan Zhang, Akanksha Saran, Bo Liu, Yifeng Zhu, Sihang Guo, Scott Niekum, Dana Ballard, Mary Hayhoe
International Joint Conference on Artificial Intelligence (IJCAI) Survey Track, 2020, 2020
paper
|
|
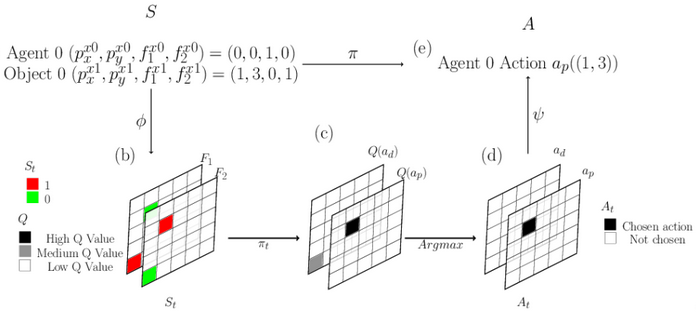
Tensor action spaces for multi-agent robot transer learning
Devin Schwab, Yifeng Zhu, Manuela Veloso
International Conference on Intelligent Robots and Systems (IROS), 2020
paper
video
|
|
Learning Primitive Skills for Mobile Robots
Yifeng Zhu, Devin Schwab, Manuela Veloso
International Conference on Robotics and Automation (ICRA), 2019
paper
video
|
|
Learning Skills for Small Size League RoboCup
Devin Schwab, Yifeng Zhu, Manuela Veloso
Robocup Symposium, 2018
paper
|
|
Zero Shot Transfer Learning for Robot Soccer
Devin Schwab, Yifeng Zhu, Manuela Veloso
Proceedings of the 17th International Conference on Autonomous Agents and Multiagent Systems, 2018
paper
|
![]()
|
Surgical Skill Level Classification Based on Surgical Tool Movements Using IMU Sensors
Yifeng Zhu et al
UCLA CSST Summer Program Poster Session, 2017
poster /
|
|